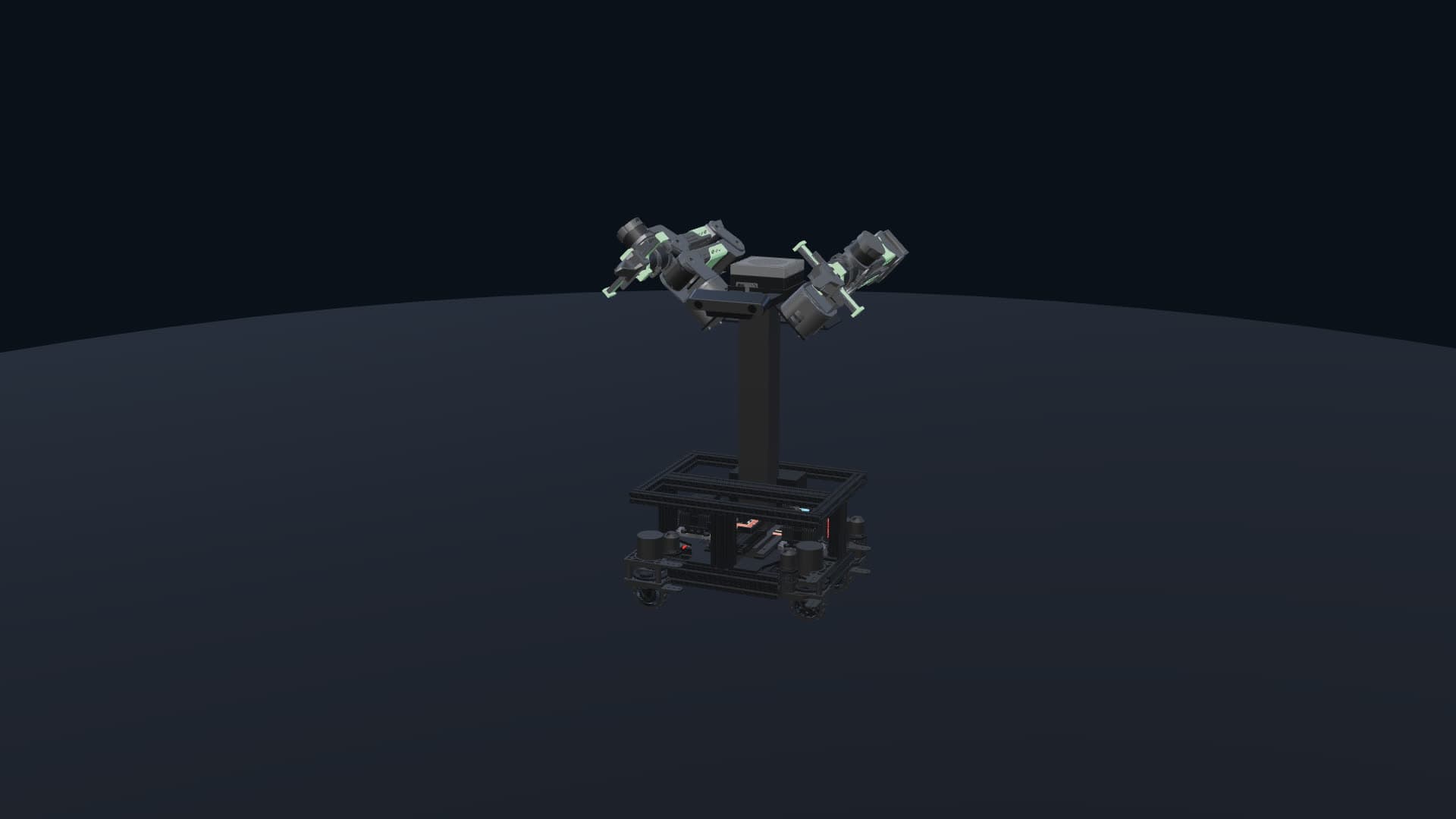
Dual-Arm Mobile AI Robot
軽作業をAIロボットで省人化
人の操作データとカメラ映像から動きを学習し、双腕による連続作業と全方向移動を1台で実現します。
Solutions


ChatGPT Work Enablement
Applications
人の操作を学習する双腕移動AIロボットで、対象物の把持・搬送・配置を自動化します。
人による判定のばらつきをなくし、検査基準の標準化と検出精度の向上を図ります。
接続したアプリやファイルを横断し、調査・分析から文書やスライドの完成まで進める業務を設計します。
両腕の協調作業と全方向移動を組み合わせ、対象工程への適用を検討します。
照明やカメラの構成を含めて、不良が安定して写る撮像条件を検証します。
Scheduled Tasksで新着情報や変化を確認し、会議資料やレポートを更新する流れを設計します。

Partnership
Track Record
News
Insights
制御・学習アルゴリズムの実験や産業応用の調査など、Physical AIに関する取り組みを発信しています。
Start a Conversation

